Denoiser
Denoiser module contains various filtering methods to ensure smooth and seamless tracking.
Dampening
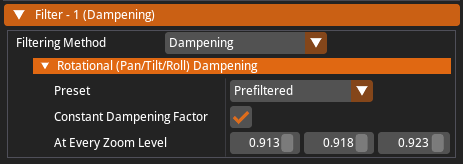
Dampening reduces angular motion, and it provides a smooth response to sudden movements. Dampener filter assumes that the motion occurs on the surface of a sphere, it reduces the amount of angular motion. Therefore, instead of damping all types of motion uniformly and at high power, it ensures a nice response to sudden movements.
Exponential
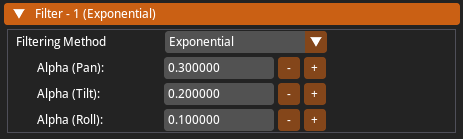
The exponential denoiser filter lets you calculate an average value by blending the weighted average of the previous filtered value with the most recent unfiltered value.
In exponential smoothing, alpha determines the weight assigned to the previous observation relative to the current observations. The higher the alpha value, the higher the filter weight becomes.
Hampel
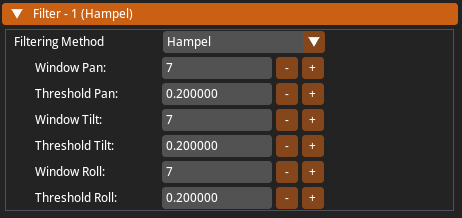
The Hampel filter works by sliding a window over the dataset and comparing each data point to the median value within that window. If a data point deviates significantly from the median by more than a specified threshold, it's considered an outlier and is replaced with a more robust estimate, typically the median or a smoothed version of the data within the window.
PolynomialFFT

This is essentially a Pan Tilt Roll filter similar to other filters. Its distinguishing feature lies in its capacity to apply positional (or locational) filtering.
The Sample Delay adjustment in PolynomialFFT applies a delay to both Pan Tilt Roll and positional adjustments. Its purpose is to introduce a delay to the frame samples received from the tracker.
When the camera moves, it's initially indistinguishable whether the motion is noise or genuine movement. Therefore, filters, when applied, naturally introduce a delay. The value assigned to the Sample Delay setting (in our case, 3) aims to keep the filter's delay close to 3 samples, facilitating the analysis of this scenario.
Extended Kalman

Extended Kalman is a filtering method that attempts to predict velocity and acceleration, considering probabilities based on incoming data. When kept at small values, the filtering power increases but, by nature, it introduces a delay. It operates within a precise range of values between 0.001 and 1.